Pilotissa toteutettiin Mevean simulaattorin päälle tekoälyllä ohjautuva kaivuri. Tarkoituksena on saada tekoälyn avulla kaivuri kaivamaan omatoimisesti kuljettajan antaman esimerkin mukaisesti. Simulaattorissa käytettyjä koodeja voidaan muokata sopimaan toisten koneiden tilanteeseen, kuten esimerkiksi metsänhoitokoneiden työtehtävien automatisoimiseen.
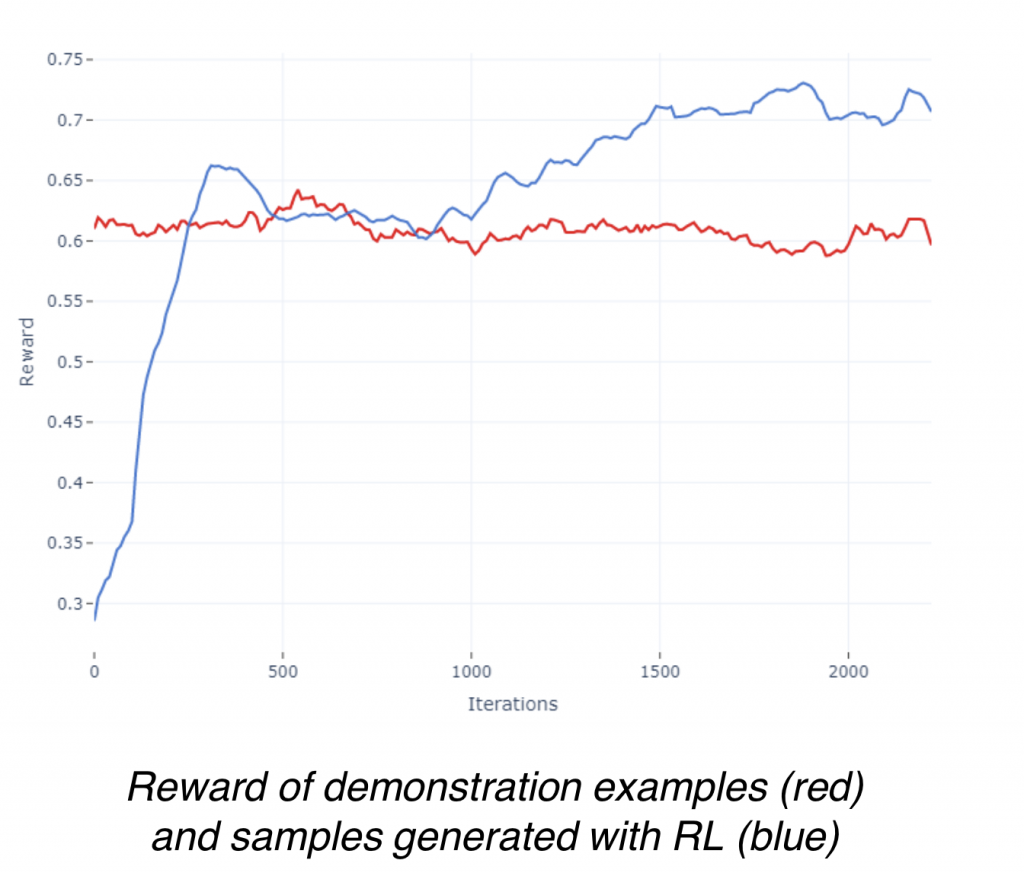
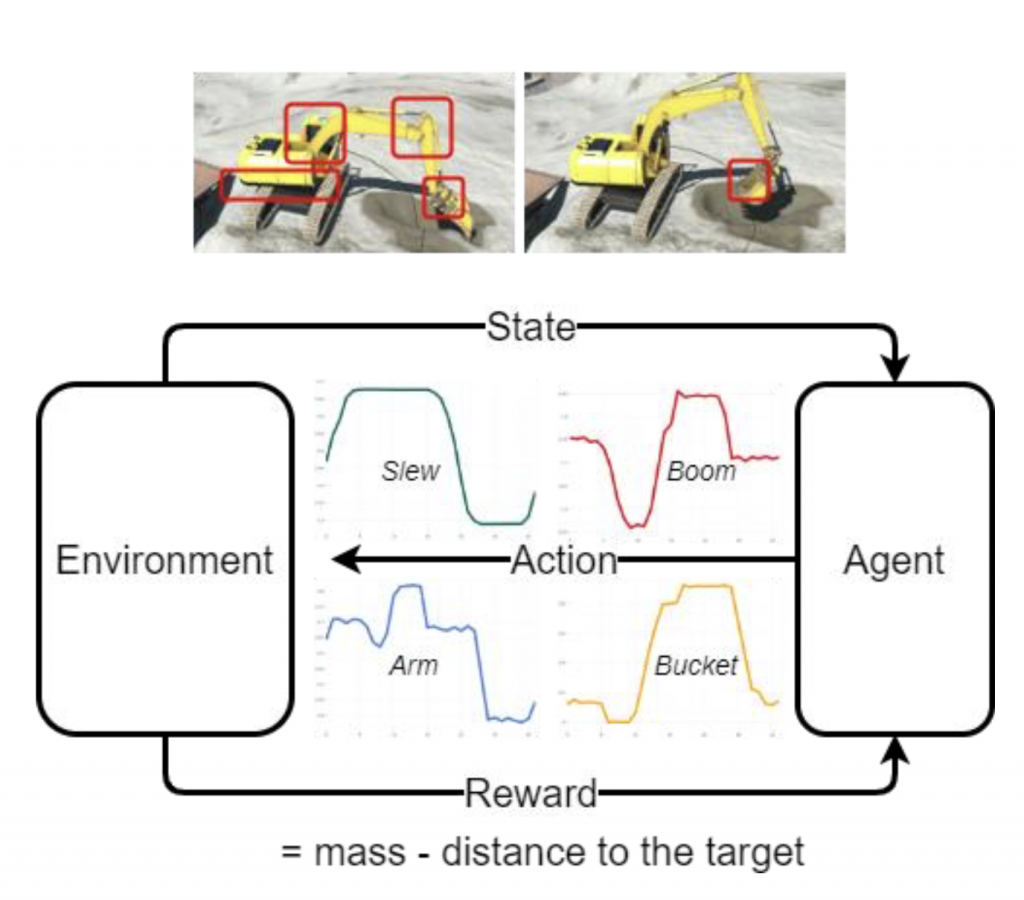
Simulaattorissa käytetään kahta eri toimintoa: tyhjentäminen ja kaivaminen, joihin valitaan kuljettajan esimerkeistä parhaimmat nopeuden ja tarkkuuden perusteella. Kaivuria opetetaan vahvistusoppimisen avulla eli kaivuri pyrkii matkimaan kuljettajan liikkeitä ja sille annetaan palautetta tehtävän onnistumisesta. Tällainen oppiminen on jatkuvaa eikä kuljettajan tarvitse itse antaa kaivurille palautetta vaan järjestelmä tekee sen itse. Vahvistusoppimisen malli koostuu kolmesta eri osasta: tilasta, teoista ja palkitsemisesta. Palkitsemisessa arvioidaan kaivurin kaivaman maa-aineksen massa ja vähennetään siitä ohjaajan esimerkissä kaivetun maa-aineksen paino.
Koko simulaattori kostuu kahdesta osasta: agentista ja ympäristöstä. Agentti sisältää varsinaisen tekoälyn sekä kontrolloi eri osien keskinäistä viestintää. Ympäristön tehtävänä on kerätä tietoa kaivurin ohjaussauvoista sekä välittää tiedot simulaattorille. Samalla tiedot näytetään käyttäjälle reaaliajassa mahdollisimman tarkasti simulaatiossa.
Simulaattorin toimintaa on havainnollistettu oheisessa videossa: https://drive.google.com/file/d/1xaPrbcaeuSkuyYewuuIVlgGE9vkiKVN0/view