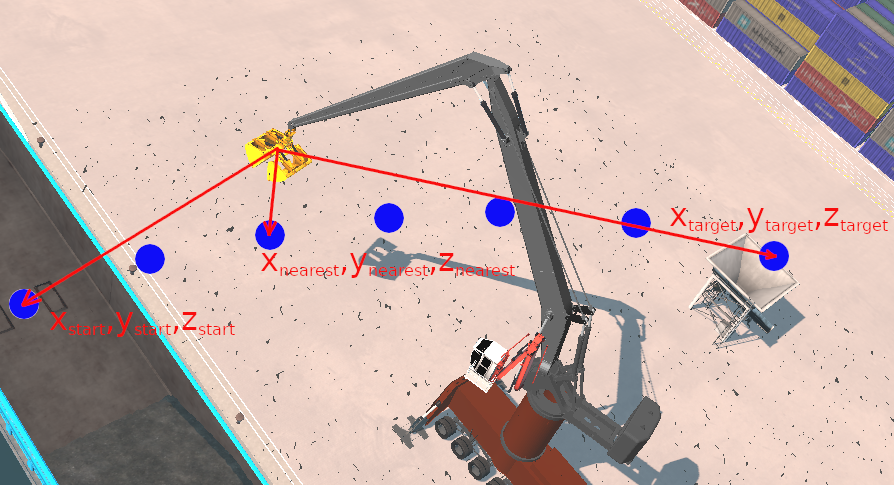
Mantsinen pilotissa tehtiin kokeiluja Mantsinen 300 nosturin käytön automatisoinnissa tekoälyn avulla. Kokeiluissa koulutettiin tekoälyä ohjaamaan nosturia. Erityisesti keskitettiin tapauksiin, jossa nosturin lähtö tilanteena on se, että se on nostamassa laivasta jotakin ja siirtää sen jonnekin toiseen paikkaan.
Vahvistusoppiminen on viimeaikoina pinnalle noussut koneoppimisen muoto. Vahvistusoppimisessa niin kutsutut agentit ja koneet itse valitsevat parhaimman menettelytavan jossakin tietyssä kontekstissa tai ympäristössä. Tämä jatkuva päätösten teko ohjaa vahvistusoppimisen mallia tekemään parempia ratkaisuja. Vahvistusoppimismalli pystyy toimimaan ja tekemään optimaalisia ratkaisuja hyvin vähäisilläkin tiedoilla ympäristöstään. Vahvistusoppimisen kanssa on kuitenkin joitakin haasteita, joiden vuoksi se ei ole saavuttanut suurta suosiota esimerkiksi teollisuuden osa-alueilla. Ehkäpä suurin ongelma vahvistusoppimisessa on sen alhainen hyötysuhe datan määrään nähden. Vahvistusoppimiselle on kuitenkin löytynyt sovelluksia esimerkiksi robotiikan saralta. Tämä johtuu siitä, että vahvistusoppiminen sopii hyvin tapauksiin, joissa koulutusprosessissa käytetään simulointia. Vahvistusoppimisessa agenttien käytetään niin kutsuttua käyttäytymisen kloonaamista. Käyttäytymisen kloonaamisen luonteen takia ei-halutut toimintamallit vahvistuvat ja kasaantuvat ja saattavat näin ajaa agentin tilaan, jossa se ei ikinä ole ollut tai jossa se ei ole harjoitellut. Tällaisessa tapauksessa lopputulos on täysin tuntematon ja saattaa johtaa lähes katastrofaaliseen epäonnistumiseen. Käyttäytymiskloonaaminen voi kuitenkin olla hyvä keino löytää agentille alkupiste, josta se voi alkaa etenemään ja parantamaan suoritustaan.